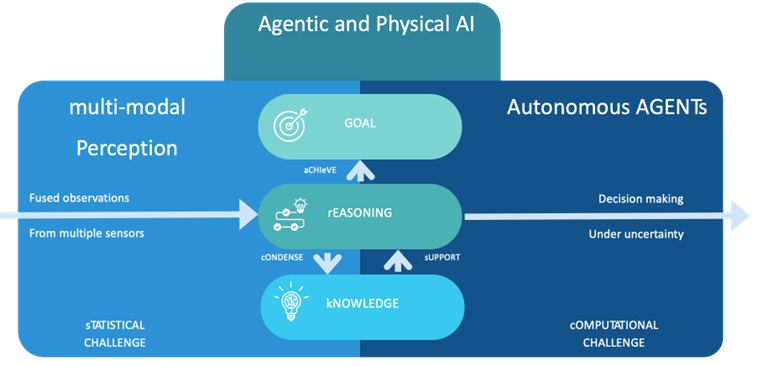
The MSP|LAB, led by Daniel Watzenig, conducts research in the fields of multi-modal perception and data fusion, agentic AI, and data-driven decision-making under uncertainty (3DM) for autonomous systems and collaborative multi-agent systems.
Our approaches link Bayesian inferential statistics with learning techniques and cover the entire chain “see-predict-reason-plan-act/interact-learn-adapt-improve” in robotics. Inspired by the recent rise of agentic AI, we focus on autonomous systems that rely on minimal human intervention and feature near-human cognition, continual learning, and cloning by direct interaction with the physical world and other agents. Our applications range from autonomous vehicles, clinical robots, humanoids, to different kinds of manipulators. Our group has research experience in perception modeling, statistical data association and data fusion, multiple target tracking, robust and embedded reinforcement learning, uncertainty quantification, and AI-based anomaly detection in robot perception

