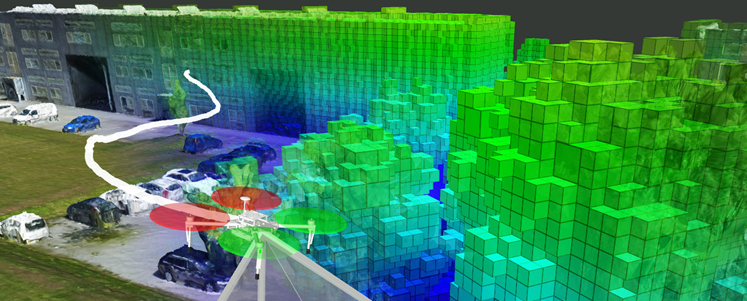
The “Robotic Computer Vision (RCV)” research group, led by Friedrich Fraundorfer, is concerned with creating algorithms and concepts to let robotic systems see and perceive the environment using camera sensors. Research at the group includes 3D computer vision techniques like stereo and multi-view stereo estimation, visual localization and pose estimation, 3D scene understanding, visual odometry and mapping and the implementation of such methods in robotic systems like drones in the institute’s indoor flying arena.